Elektromotor je zařízení, které přeměňuje elektrickou energii na mechanickou energii. Konstrukčně se jednotka skládá ze statoru (pevného) a rotoru (rotuje). První vytváří magnetický tok a druhý se otáčí pod vlivem elektromotorické síly (EMF).
Rozdíl – stručně jednoduchými slovy
Stručně a jednoduše řečeno, synchronní a asynchronní motory se liší konstrukcí svých rotorů. Zvenčí je téměř nemožné pochopit, který elektromotor je před vámi, kromě přítomnosti přídavných chladicích žeber pro asynchronní elektromotory.

U zařízení pracujícího na synchronním principu je na rotoru upraveno vinutí s nezávislým napájením napětí.
V asynchronním motoru není proud přiváděn do rotoru, ale je generován pomocí magnetického pole statoru. Statory obou jednotek jsou přitom designově totožné a mají podobnou funkci – vytváření magnetického pole.

U synchronního motoru navíc magnetická pole statoru a rotoru vzájemně působí a mají stejnou rychlost.

Asynchronní jednotky mají ve štěrbinách rotoru zkratované kovové destičky nebo kontaktní kroužky, které velikostí posuvu zajišťují rozdíl v magnetickém poli mechanismu rotoru a statoru.

Navzdory zdánlivé jednoduchosti je nepravděpodobné, že bude možné se s tímto problémem okamžitě vypořádat, takže se na problém budeme podrobněji dívat. Promluvme si o vlastnostech a rozdílech mezi asynchronními a synchronními stroji.
Synchronní motor (SM)
Synchronní motor je jednotka s individuální konstrukcí rotoru a induktorem s permanentním magnetem. Vyznačuje se vylepšenými charakteristikami výkonu, točivého momentu a setrvačnosti. Má řadu konstrukčních prvků a provozních principů.
Zařízení
Konstrukčně se skládá ze dvou prvků: rotoru (rotuje) a statoru (pevný mechanismus). Sestava rotoru je umístěna uvnitř statoru, ale existují provedení, kde je rotor umístěn na horní straně statoru.
Rotor obsahuje permanentní magnety vyznačující se zvýšenou koercitivní silou.
Strukturálně jsou LED rozděleny do dvou typů podle jejich pólů:
- Implicitně vyjádřeno. Liší se stejnou indukčností podél příčné a podélné osy.
- Explicitně vyjádřeno. Příčná a podélná indukčnost mají různé parametry.

Strukturálně se rotory dodávají v různých provedeních a provedeních.
Magnety jsou zejména:
- Venkovní instalace.
- Vložené.
Stator se obvykle skládá ze dvou součástí:

Vinutí statorového mechanismu je dvou typů:
- Distribuováno. Jeho rozdíl spočívá v počtu slotů na pól a fázi. Pohybuje se od dvou nebo více.
- Soustředěno. Na jeden pól a fázi je pouze jeden počet drážek a samotné drážky jsou rozmístěny rovnoměrně po povrchu statorové části. Dvojice cívek, které tvoří vinutí, může být zapojena paralelně nebo sériově. Nevýhodou takových vinutí je nemožnost ovlivnění vedení EMF.
Tvar elektromotorické síly elektrického synchronního motoru je ve tvaru:
- Trapéz. Charakteristické pro zařízení s výrazným pólem.
- Sinusoidy. Vzniká zkosením hrotů na kůlech.
Obecně řečeno, synchronní motor se skládá z následujících prvků:
- montáž s ložisky;
- jádro;
- rukáv;
- magnety;
- kotva s vinutím;
- rukáv;
- „talíř“ vyrobený z oceli.

Princip činnosti
Nejprve se do vinutí pole přivádí stejnosměrný proud. Vytváří magnetické pole v části rotoru. Stator zařízení obsahuje vinutí pro vytvoření magnetického pole.
Jakmile je na vinutí statoru přiveden proměnný proud, vytvoří se točivý moment podle Ampérova zákona a rotor se začne otáčet frekvencí rovnou frekvenci proudu v sestavě statoru. V tomto případě jsou oba parametry totožné, proto se motor nazývá synchronní.
Rotační EMF je tvořeno díky nezávislému zdroji energie, který vám umožňuje měnit rychlost a nebýt vázán na výkon připojených spotřebičů.

Vezmeme-li v úvahu zvláštnosti provozu, nemůže se synchronní elektromotor po připojení ke zdroji třífázového proudu sám rozběhnout.
Rozsah aplikace
Elektromotor synchronního typu má díky konstantní rychlosti otáčení širokou škálu aplikací.
Tato funkce rozšiřuje rozsah její aplikace:
- energie: zdroje jalového výkonu pro udržení napětí, udržování stability sítě při nouzových poklesech;
- strojírenství, například při výrobě gilotinových nůžek s vysokým rázovým zatížením;
- další oblasti – rotace výkonných kompresorů nebo ventilátorů, generátory u elektráren, zajištění stabilního provozu čerpacích zařízení atd.

Výhody a nevýhody
Po zvážení konstrukčních vlastností, principu činnosti a rozsahu použití SD shrneme pozitivní / negativní vlastnosti.
- Schopnost pracovat s kosinusem Phi rovným jedné (poměr užitečného výkonu k celkovému výkonu). Tato funkce zlepšuje kosinus phi sítě. Při práci s vedoucím proudem synchronní stroje generují jalový výkon, který je dodáván do asynchronních motorů a snižuje spotřebu „činidla“ z generátorů elektráren.
- Vysoká účinnost, dosahující 97-98%.
- Zvýšená spolehlivost díky velké vzduchové mezeře.
- Dostupnost regulace charakteristiky přetížení v důsledku změn proudu dodávaného do rotoru.
- Nízká citlivost na změny síťového napětí.
- Složitější konstrukce a tím i vysoké výrobní náklady.
- Potíže se startováním, protože to vyžaduje speciální zařízení: budič, usměrňovač.
- Požadavek na zdroj stejnosměrného proudu.
- Používejte pouze pro mechanismy, které nepotřebují měnit rychlost.
Příklad SD2-85/37-6U3, 500 kW, 1000 ot./min, 6000 V.

СД2-85/37-6У3, 500кВт, 1000об/мин, 6000В
Asynchronní motor (IM)
Asynchronní (indukční) elektromotor s různou frekvencí otáčení magnetického pole ve statoru a otáčkami rotoru. V závislosti na typu a nastavení může pracovat v režimu motoru nebo generátoru, režimu XX nebo elektromagnetické brzdy.
Návrhové prvky
Strukturálně je obtížné odlišit asynchronní mechanismy od synchronních. Skládají se také ze dvou hlavních jednotek: statoru a rotoru. V tomto případě může být sestava rotoru fázová nebo zkratovaná. Stále ale existují drobné designové rozdíly.

Podívejme se, z čeho se skládá asynchronní motor:
- jádro;
- ventilátor s pouzdrem;
- ložisko;
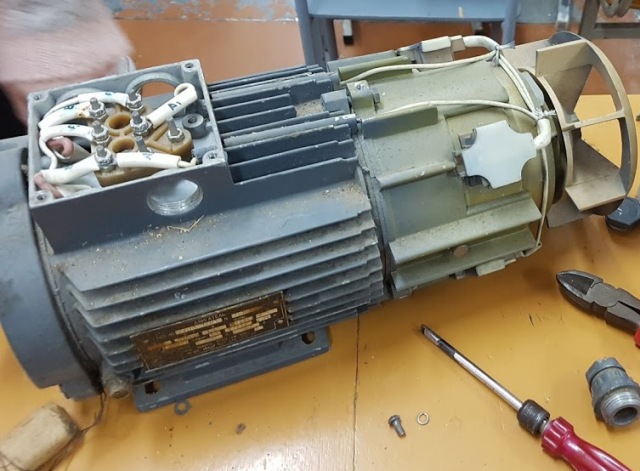
- svorkovnice;
- trojité vinutí;
- sběrací kroužky.

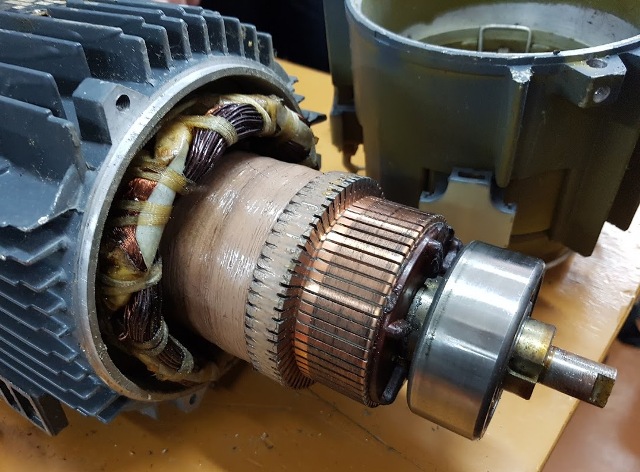
S přihlédnutím k výše uvedenému je jedním z hlavních rozdílů absence vinutí na kotvě (výjimkou je fáze IM). Místo vinutí obsahuje rotor tyče vzájemně zkratované.

Princip
U asynchronního motoru vzniká magnetické pole vlivem proudu ve vinutí statoru umístěného ve speciálních štěrbinách. Na rotoru, jak je uvedeno výše, nejsou žádná vinutí, ale místo toho jsou zde zkratované kombinované tyče. Tato vlastnost je typická pro mechanismus rotoru s kotvou nakrátko.
U druhého typu rotoru (fáze) jsou na rotoru umístěna vinutí, jejichž proud a odpor lze regulovat jednotkou reostatu.

Jednoduše řečeno, princip fungování lze rozdělit do několika složek:
- Při přivedení napětí se ve statoru vytvoří magnetické pole.
- V rotoru se objeví proud, který interaguje s EMF statoru.
- Rotorový mechanismus se otáčí stejným směrem, ale se zpožděním (prokluzem) 1 až 8 procent.
Rozsah aplikace
Asynchronní elektromotory jsou v každodenním životě velmi žádané kvůli jednoduchosti konstrukce a spolehlivosti v provozu.
Často se používají v domácím vybavení:
- pračky;
- ventilátor;
- kapuce;
- míchačky betonu;
- sekačky na trávu atd.
Používají se i ve výrobě, kde se připojují do 3-fázové sítě.
Do této kategorie spadají následující mechanismy:
- kompresory;
- větrání;
- čerpadla;
- automatické ventily;
- jeřáby a navijáky;
- dřevoobráběcí stroje atd.
Asynchronní stroje se používají v elektrické dopravě a dalších oborech. Našly uplatnění ve věžových jeřábech, výtazích atd.
Příklad Třífázový AIR 315S2 660V 160kW 3000ot.

Třífázový AIR 315S2 660V 160kW 3000ot.
Výhody a nevýhody
Elektromotor asynchronního typu má slabé a silné stránky, které je třeba mít na paměti.
- Jednoduchý design, který je dán třífázovým schématem zapojení a jednoduchým principem činnosti.
- Nižší náklady ve srovnání se synchronním analogem.
- Možnost přímého startu.
- Nízká spotřeba energie, díky čemuž je motor hospodárnější.
- Vysoký stupeň spolehlivosti díky zjednodušené konstrukci.
- Všestrannost a možnost použití v oblastech, kde není potřeba podpora rychlosti, nebo kde je schéma zpětnovazebního řízení.
- Lze použít při připojení k jedné fázi.
- Úspěšný samočinný start skupiny IM při ztrátě a následném napájení do nich.
- Minimální provozní náklady. Vše, co je potřeba, je pravidelně čistit mechanismus od prachu a utáhnout spojení kontaktů. Pokud dodržíte požadavky výrobců, lze ložiska měnit každých 15-20 let.
- Přítomnost kluzného efektu, který zajišťuje, že rotace rotoru zaostává za frekvencí rotace pole uvnitř mechanismu.
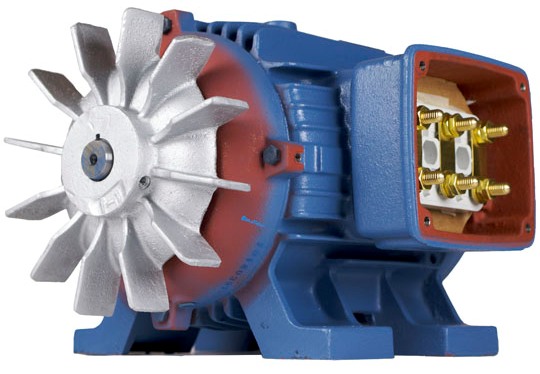
- Tepelné ztráty. Asynchronní motory mají tendenci se přehřívat, zejména při velkém zatížení. Z tohoto důvodu je tělo výrobku vyrobeno žebrovaným pro zvětšení chladicí plochy (u SD to není použito u všech modelů). Kromě toho lze nainstalovat ventilátor, který fouká povrch.
- Napětí pouze 220 V a více. Kvůli konstrukčním vlastnostem se takové elektromotory nevyrábějí pro provozní napětí menší než 220 V. Jako náhrada se často používají hydraulické nebo pneumatické pohony.
- Nízká účinnost při spouštění a vysoká reaktivita. Z tohoto důvodu se motor může přehřát již při spuštění. To omezuje počet startů v určitém časovém období.
- Rychlost synchronního otáčení nesmí být vyšší než 3000 ot./min., protože jinak je nutné použití přeplňovaného pohonu nebo rychloběhové převodovky.
- Potíže s regulací zařízení poháněných synchronními systémy.
- Zvýšený rozběhový proud je jedním z hlavních problémů asynchronních motorů s výkonem nad 10 kW. V okamžiku spuštění může proudové zatížení překročit jmenovitou hodnotu šestkrát až osmkrát a trvat až 5-10 sekund. Z tohoto důvodu se přímé připojení pro asynchronní uživatele nedoporučuje.
- Když dojde ke zkratu v blízkosti přípojnic při běžícím motoru, objeví se doplňování proudu.
- Citlivost na změny napětí. Pokud se tento parametr odchyluje o více než 5 %, výkon elektromotoru se odchyluje od jmenovitého. Pokud se napětí sníží, točivý moment krevního tlaku se sníží.
Porovnání synchronních a asynchronních motorů
Na závěr můžeme shrnout, jaké jsou hlavní rozdíly mezi asynchronními (AM) a synchronními (SD) motory.
Zdůrazněme základní body:
- Rotor asynchronních motorů nevyžaduje napájení proudem a indukce na pólech závisí na magnetickém poli statoru.
- Otáčky IM při zatížení se zpožďují o 1-8 % od rychlosti otáčení pole statoru. V SD je počet otáček stejný.
- „Synchronizátor“ má budicí vinutí.
- Strukturálně je rotor SD magnet: permanentní, elektrický. U IM je magnetické pole v mechanismu rotoru indukováno pomocí indukce.
- Synchronní stroj nemá rozběhový moment, takže k dosažení synchronizace je potřeba asynchronní rozběh.
- „Synchronizátory“ se používají v případech, kdy je potřeba zajistit kontinuitu výrobního procesu a není potřeba časté restartování. IM jsou potřeba tam, kde je vyžadován vysoký rozběhový moment a dochází k častým zastávkám.
- LED potřebuje další zdroj proudu.
- „Asynchronní“ se opotřebovávají pomaleji, protože v jejich konstrukci nejsou žádné sběrací kroužky s kartáči.
- Krevní tlak je zpravidla charakterizován nekulatým počtem otáček, zatímco SD je charakterizován zaokrouhleným číslem.
O jalovém výkonu
Synchronní elektromotory generují a současně spotřebovávají jalový výkon. Vlastnosti a parametry „činidla“ závisí na proudu v budícím vinutí. Při plné zátěži je kosinus Phi roven 1. V tomto režimu LED nespotřebovává „reagent“ ze sítě a proud ve vinutí statoru je minimální.
Zde je důležité pochopit, že jalový výkon zhoršuje parametry energetického systému. Velký parametr neaktivních proudů vede ke zvýšené spotřebě paliva, zvýšeným ztrátám a snížení napětí.
Kromě toho „činidlo“ zatěžuje elektrické přenosové vedení, což vede k potřebě zvětšit průřez kabelů a vodičů, a tedy zvýšit kapitálové náklady.

Dnes je jedním z hlavních úkolů energetiků kompenzace jalového výkonu. Mezi jeho hlavní spotřebitele patří IM, který spotřebuje 40 % „činidla“, elektrické pece, konvertory, elektrické vedení a výkonové transformátory.

Což je lepší
Při porovnávání asynchronních a synchronních elektromotorů je těžké odpovědět, co je lepší. Z hlediska designu a spolehlivosti vítězí IM, který má při mírném zatížení delší životnost. U LED se kartáčky rychle opotřebovávají, což vyžaduje jejich výměnu.
Jinak se jedná o dva designově podobné, ale lišící se principem fungování mechanismu s jednotlivými oblastmi použití.
Asynchronní motory jsou motory, u kterých je při provozu pod zatížením pozorován jev skluzu, to znamená „zpoždění“ v rotaci rotoru od rotace magnetického pole statoru. Jinými slovy, rotace rotoru neprobíhá synchronně s rotací magnetizace statoru, ale asynchronně vzhledem k tomuto pohybu. Proto se tyto druhy motorů nazývají asynchronní (nesynchronní) motory.
Ve většině případů, když vyslovíte frázi „indukční motor“, mají na mysli bezkomutátorový střídavý motor. Velikost skluzu asynchronního motoru se může lišit v závislosti na zatížení, stejně jako na výkonových parametrech a způsobu řízení proudů statorového vinutí.
Pokud máme co do činění s konvenčním střídavým motorem, jako je AIR712A, pak s rychlostí otáčení synchronního magnetického pole 3000 ot./min, za podmínek jmenovitého mechanického zatížení hřídele 750 wattů, budeme mít skutečnou rychlost otáčení 2840 ot./min. což znamená, že hodnota skluzu bude 0,053.
To je u asynchronního motoru normální. A na referenčním štítku neuvidíme kulaté počty otáček jako 3000 nebo 1500, místo toho tam bude uvedeno 2730 nebo 1325. Místo 1000 může být napsáno například 860, přestože se magnetické pole otáčí při frekvenci 1000 otáček za minutu, jak by tomu mělo být u elektrického stroje se 3 páry magnetických pólů, určeného pro napájení střídavým proudem o frekvenci 50 Hz.
Pokud jde o stejnosměrné motory, ve většině případů se jedná o to, co se nazývá komutátorové motory, jejichž otáčky rotoru nejsou ovlivněny frekvencí proudu, ale jeho průměrnou hodnotou. Snímač rychlosti může pomoci elektronickému řídicímu systému nastavit správné množství proudu pro dosažení dané rychlosti otáčení, avšak vztah mezi proudem a otáčkami zde nebude vůbec lineární, protože při různém zatížení budou proudy různých velikostí poskytovat velmi různé rychlosti rotoru.
Rotor stejnosměrného motoru může mít vícedílné budicí vinutí nebo permanentní magnety. Ale dnes je rotor s magnety typičtější pro krokové motory, což jsou také stejnosměrné motory, ale nemají jednotky komutátor-kartáč. Další variantou konstrukce stejnosměrného motoru je, že magnety jsou na statoru a vinutí je na rotoru.
Tak či onak, asynchronní bezkomutátorový motor má na statoru výkonné pracovní vinutí, které se při provozu zahřívá průchodem provozního proudu přes něj a přenáší teplo do skříně motoru. Proto musí být vinutí i skříň motoru neustále aktivně chlazeny.
V souvislosti s touto vlastností má většina asynchronních motorů standardně na hřídelích oběžná kola ventilátorů a na jejich pouzdrech jsou výstupky, po kterých ventilátor jako přes chladič pohání čerstvý vzduch a tím ochlazuje stator. Pokud tedy máte před sebou motor, na jehož hřídeli je nainstalován ventilátor (obvykle pod krytem připevněným ke skříni motoru), jsou podél těla žebra (jako na chladiči) a typový štítek označuje specifická hodnota otáček a hodnota střídavého napětí 220/380 – Toto je typický střídavý indukční motor.
U stejnosměrných motorů, s jednotkami komutátor-kartáč a s vícesekčními víceotáčkovými vinutími na kotvách vyvedených na lamely komutátoru, působí jak vinutí statoru, tak vinutí rotoru (kotvy) jako pracovní vinutí.
Zde se vlastně ukazuje, že pracovní vinutí je jakoby rozděleno na dvě části: pracovní proud protéká jak vinutím kotvy, tak vinutím statoru, takže není problém ohřívat pouze stator a ventilátor zde není potřeba.
Pro chlazení je dostatek větracích otvorů, kterými je vidět rotor s vinutím kotvy. Pokud tedy máte motor se sestavou komutátor-kartáč, kde má komutátor mnoho lamel (lesklých desek) s vývody od vinutí a zdá se, že tam není žádný ventilátor, pak máte stejnosměrný motor.
Stator stejnosměrného motoru může být soustava permanentních magnetů. Většina stejnosměrných motorů navržených pro síťové napětí bude snadno fungovat na střídavý proud (příkladem takového univerzálního motoru je motor úhlové brusky).
Doufám, že vám byl tento článek užitečný. Podívejte se také na další články z kategorie Pomoc začínajícím elektrikářům, Elektromotory a jejich aplikace
















