Bezkomutátorové stejnosměrné (BLDC) motory jsou typem synchronního motoru s permanentními magnety, který je napájen stejnosměrným obvodem přes invertor ovládaný zpětnovazebním regulátorem. Regulátor dodává fázím motoru napětí a proudy potřebné k vytvoření požadovaného točivého momentu a provozu při požadovaných otáčkách. Tento regulátor nahrazuje sestavu kartáč-komutátor používanou u kartáčovaných stejnosměrných motorů. Bezkomutátorové motory mohou pracovat jak s napětími na vinutích ve formě čisté sinusovky, tak v po částech (např. s blokovou komutací).
Bezkomutátorové stejnosměrné motory se objevily jako pokus zbavit stejnosměrné motory s permanentními magnety jejich slabého místa – sestavy kartáč-komutátor. Tato jednotka, která je otočným elektrickým kontaktem, je slabým místem komutátorových motorů z hlediska spolehlivosti a v některých případech omezuje jejich parametry.

Princip činnosti a konstrukce bezkomutátorového motoru
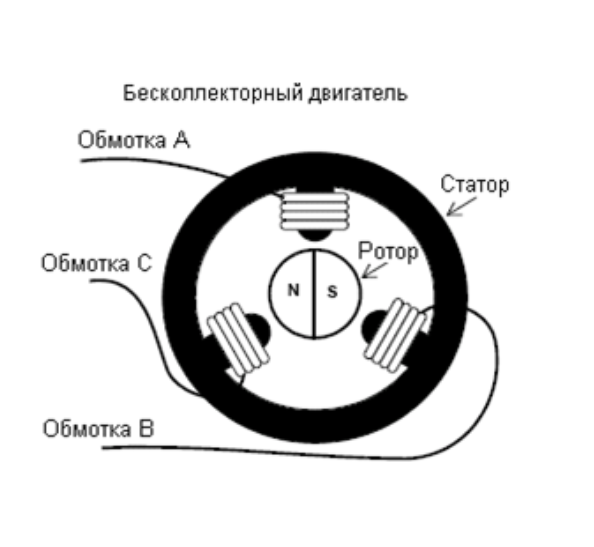
Stejně jako ostatní motory se i bezkomutátorový motor skládá ze dvou hlavních částí – rotoru (pohyblivá část) a statoru (nehybná část). Většina bezkomutátorových stejnosměrných motorů je třífázových, takže na statoru je třífázové vinutí. Rotor nese permanentní magnet, který může mít jeden nebo více párů pólů. Když je na vinutí statoru aplikován třífázový napěťový systém, vinutí vytváří rotující magnetické pole. Spolupracuje s permanentním magnetem na rotoru a uvádí jej do pohybu. Jak se rotor otáčí, jeho vektor magnetického pole se otáčí směrem k magnetickému poli statoru. Řídicí elektronika sleduje směr, kterým se ubírá magnetické pole rotoru, a mění napětí aplikovaná na vinutí statoru tak, aby se magnetické pole generované vinutím statoru otáčelo před magnetickým polem rotoru. Pro určení směru magnetického pole rotoru se používá snímač polohy rotoru, protože magnet, který toto pole vytváří, je pevně připevněn k rotoru. Napětí na vinutí bezkomutátorového motoru lze generovat různými způsoby: jednoduchým přepínáním vinutí každých 60° rotace rotoru nebo generováním sinusových napětí pomocí pulzně šířkové modulace.
Možnosti konstrukce motoru
 |  |  |
 |  |  |
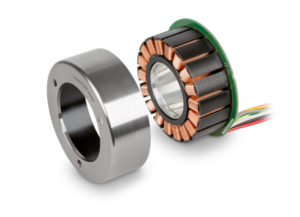
Vinutí motoru může mít různé konstrukce. Vinutí klasického provedení je navinuto na ocelovém jádru. Další možností provedení vinutí je vinutí bez ocelového jádra. Vodiče tohoto vinutí jsou rovnoměrně rozmístěny po obvodu statoru. Charakteristiky vinutí jsou různé, což se odráží na vlastnostech motoru. Kromě toho mohou být vinutí vyrobena pro jiný počet fází a s různým počtem pólových párů.
Bezkomutátorové motory mohou mít také konstrukce, které se liší vzájemnou polohou rotoru a statoru. Nejběžnější provedení je, kdy je rotor zvenčí krytý statorem – motory s vnitřním rotorem. Ale je také možné a v praxi se vyskytující provedení, ve kterém je rotor umístěn mimo stator – motory s vnějším rotorem. Třetí možností je, že stator je umístěn rovnoběžně s rotorem a oba jsou umístěny kolmo k ose otáčení motoru. Takové motory se nazývají motory axiální konstrukce.
Snímač polohy, který měří úhlovou polohu rotoru motoru, je důležitou součástí pohonného systému postaveného na bezkomutátorovém motoru. Tento snímač se může velmi lišit jak typem, tak principem činnosti. Typ senzorů tradičně používaný pro tento účel jsou Hallovy senzory s logickým výstupem, instalované na každé fázi motoru. Výstupní signály těchto snímačů umožňují určit polohu rotoru s přesností až 60° – dostačující pro realizaci nejjednodušších způsobů ovládání vinutí. Pro implementaci metod řízení motoru, které zahrnují vytvoření sinusového napěťového systému na vinutí motoru pomocí PWM, je zapotřebí přesnější senzor, například kodér. Inkrementální enkodéry, velmi široce používané v moderních elektrických pohonech, mohou poskytnout dostatečné informace o poloze rotoru pouze ve spojení s Hallovými snímači. Pokud je střídavý motor vybaven snímačem absolutní polohy – absolutním kodérem nebo resolverem (ASKVT), pak Hallovy snímače již nejsou potřeba, protože kterýkoli z těchto snímačů poskytuje kompletní informace o poloze rotoru.
Bezkomutátorový motor můžete ovládat bez použití snímače polohy rotoru – bezsenzorová komutace. V tomto případě se informace o poloze rotoru obnoví na základě údajů z jiných snímačů, například snímačů fázového proudu motoru nebo snímačů napětí. Tento způsob řízení s sebou často nese řadu nevýhod (omezený rozsah otáček, vysoká citlivost na parametry motoru, speciální postup spouštění), což omezuje jeho rozšíření.
Výhody a nevýhody
Vysoká spolehlivost díky absenci kolektoru. To je hlavní rozdíl mezi bezkomutátorovými motory a kartáčovými motory. Kartáč-kolektor je pohyblivý elektrický kontakt a sám o sobě má nízkou spolehlivost a odolnost vůči různým vlivům prostředí.
Není třeba provádět údržbu kolektorové jednotky . To platí zejména pro střední a velké motory. U mikroelektromotorů nejsou opravy ve všech případech ekonomicky opodstatněné, proto pro ně tento bod není relevantní.
Komplexní schéma ovládání. Přímý důsledek přenesení funkce spínání proudů vinutí na externí komutátor. Pokud v nejjednodušším případě pro ovládání kartáčovaného motoru potřebujete pouze zdroj energie, pak pro bezkomutátorový motor tento přístup nefunguje – regulátor je potřebný i pro řešení nejjednodušších úloh řízení pohybu. Pokud však jde o řešení složitých případů (například problémy s polohováním), regulátor se stává nezbytným pro všechny typy motorů.
Vysoká rychlost otáčení. U komutátorových motorů je rychlost pohybu kartáče podél komutátoru omezená, i když se liší pro různé konstrukce obou částí a různé použité materiály. Maximální rychlost pohybu kartáčů podél komutátoru značně omezuje rychlost otáčení komutátorových motorů. Bezkomutátorové motory takové omezení nemají, což jim umožňuje pracovat rychlostí až několik set tisíc otáček za minutu – což je u kartáčových motorů nedosažitelná hodnota.
Vysoká hustota výkonu. Schopnost dosahovat vysokých výkonových hustot je důsledkem vysokých rychlostí otáčení, které má bezkomutátorový motor k dispozici.
Dobrý odvod tepla z vinutí. Vinutí bezkomutátorových motorů je pevně uloženo na statoru a je možné zajistit dobrý tepelný kontakt se skříní, která odvádí teplo vznikající v motoru do okolí. U kartáčovaného motoru je vinutí namontováno na rotoru a jeho tepelný kontakt s pouzdrem je mnohem horší než u bezkomutátorového motoru.
Více drátů k připojení. Když je motor umístěn v blízkosti ovladače, rozhodně to není důvod ke smutku. Pokud jsou však okolní podmínky, ve kterých motor pracuje, velmi složité, pak je pro vývojáře systému někdy jedinou dostupnou možností přesunutí řídicí elektroniky do značné vzdálenosti (desítky a stovky metrů) od motoru. Za takových podmínek bude každý další obvod pro připojení motoru vyžadovat další jádra v kabelu, čímž se zvýší jeho velikost a hmotnost.
Snížení elektromagnetického rušení z motoru . Kontakt kartáč-kolektor vytváří během provozu poměrně silné rušení. Frekvence tohoto rušení závisí na otáčkách motoru, což ztěžuje jejich boj. U bezkomutátorového motoru je jediným zdrojem rušení PWM výkonových spínačů, jejichž frekvence je obvykle konstantní.
Přítomnost složitých elektronických součástek. Elektronické součásti (například Hallovy senzory) jsou zranitelnější než jiné součásti motoru vůči drsným podmínkám prostředí, ať už jde o vysokou teplotu, nízkou teplotu nebo ionizující záření. Kartáčované motory neobsahují elektroniku a nemají tuto zranitelnost.
Kde se používají bezkomutátorové motory
V současné době se bezkomutátorové motory rozšířily, a to jak díky jejich vysoké spolehlivosti, vysoké hustotě výkonu a schopnosti pracovat při vysokých rychlostech, tak díky rychlému vývoji polovodičové technologie, která zpřístupnila výkonné a kompaktní regulátory pro řízení těchto motorů.
Bezkomutátorové motory jsou široce používány v systémech, kde jejich vlastnosti dávají výhodu oproti jiným typům motorů. Například tam, kde je požadována rychlost otáčení několik desítek tisíc otáček za minutu. Pokud výrobek vyžaduje dlouhou životnost a oprava je nemožná nebo omezená kvůli provozním vlastnostem výrobku, pak bude dobrou volbou bezkomutátorový motor.















