Domácí a lékařské přístroje, letecké modelářství, potrubní uzavírací pohony pro plynovody a ropovody – to není úplný seznam aplikací pro bezkomutátorové stejnosměrné motory (BD). Podívejme se na zařízení a princip činnosti těchto elektromechanických pohonů, abychom lépe porozuměli jejich výhodám a nevýhodám.
Obecné informace, zařízení, rozsah
Jedním z důvodů zájmu o BD je zvýšená potřeba vysokootáčkových mikromotorů s přesným polohováním. Vnitřní struktura takových pohonů je znázorněna na obrázku 2.

Rýže. 2. Zařízení střídavého motoru
Jak vidíte, konstrukce je rotor (kotva) a stator, první má permanentní magnet (nebo několik magnetů uspořádaných v určitém pořadí) a druhý je vybaven cívkami (B) pro vytvoření magnetického pole.
Je pozoruhodné, že tyto elektromagnetické mechanismy mohou být buď s vnitřní kotvou (tento typ konstrukce je vidět na obrázku 2) nebo vnější (viz obrázek 3).

Rýže. 3. Provedení s vnější kotvou (outrunner)
V souladu s tím má každý z návrhů specifický rozsah. Zařízení s vnitřní armaturou mají vysokou rychlost otáčení, proto se používají v chladicích systémech, jako elektrárny pro drony atd. Pohony externího rotoru se používají tam, kde je vyžadováno přesné polohování a tolerance točivého momentu (robotika, lékařská zařízení, CNC stroje atd.).

Střídavý motor v počítačové jednotce
Princip činnosti
Na rozdíl od jiných pohonů, např. asynchronního stroje na střídavý proud, je pro provoz DB zapotřebí speciální regulátor, který zapíná vinutí tak, že vektory magnetických polí kotvy a statoru jsou vůči sobě ortogonální. jiný. To znamená, že hnací zařízení ve skutečnosti reguluje točivý moment působící na kotvu DB. Tento proces je jasně znázorněn na obrázku 4.

Provozní fáze střídavého pohonu
Jak vidíte, pro každý pohyb kotvy je nutné provést určitou komutaci ve vinutí statoru bezkomutátorového motoru. Tento princip fungování neumožňuje plynulé ovládání rotace, ale umožňuje rychle získat hybnost.
Rozdíly mezi kartáčovanými a bezkomutátorovými motory
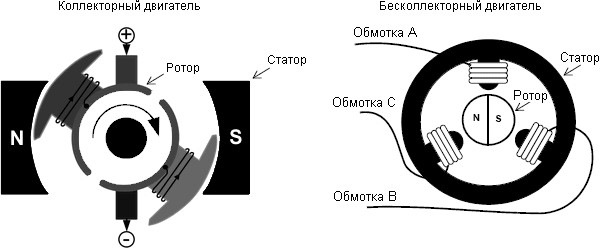
Pohon kolektorového typu se od BD liší jak konstrukčními prvky (viz obr. 5.), tak principem činnosti.

Rýže. 5. A – kolektorový motor, B – bezkomutátorový
Pojďme se podívat na designové rozdíly. Obrázek 5 ukazuje, že rotor (1 na obr. 5) motoru kolektorového typu má na rozdíl od bezkomutátorového cívky, které mají jednoduché schéma vinutí, a na statoru jsou instalovány permanentní magnety (obvykle dva) (2 na obr. 5). Kromě toho je na hřídeli instalován kolektor, ke kterému jsou připojeny kartáče, které přivádějí napětí do vinutí kotvy.
Stručně popište princip činnosti kolektorových strojů. Při přivedení napětí na jednu z cívek dojde k jejímu vybuzení a vytvoření magnetického pole. Spolupracuje s permanentními magnety, což způsobuje rotaci kotvy a na ní umístěného kolektoru. Výsledkem je, že energie je dodávána do druhého vinutí a cyklus se opakuje.
Frekvence otáčení kotvy této konstrukce přímo závisí na intenzitě magnetického pole, které je zase přímo úměrné napětí. To znamená, že ke zvýšení nebo snížení rychlosti stačí zvýšit nebo snížit úroveň výkonu. A pro obrácení je nutné přepnout polaritu. Tento způsob ovládání nevyžaduje speciální ovladač, protože ovladač pojezdu může být vyroben na základě proměnného odporu a konvenční spínač bude fungovat jako invertor.
Konstrukční vlastnosti bezkomutátorových motorů jsme zvažovali v předchozí části. Jak si pamatujete, jejich připojení vyžaduje speciální ovladač, bez kterého prostě nebudou fungovat. Ze stejného důvodu nelze tyto motory použít jako generátor.
Za zmínku také stojí, že u některých pohonů tohoto typu jsou pro efektivnější řízení polohy rotoru sledovány pomocí Hallových senzorů. To výrazně zlepšuje vlastnosti bezkomutátorových motorů, ale vede to ke zvýšení nákladů na již tak nákladnou konstrukci.
Jak nastartovat bezkomutátorový motor?
Aby tento typ pohonu fungoval, je nutný speciální ovladač (viz obrázek 6). Bez něj je spuštění nemožné.

Rýže. 6. Střídavé regulátory motorů pro modelování
Nemá smysl sestavit takové zařízení sami, bude levnější a spolehlivější koupit hotové. Můžete jej vybrat podle následujících charakteristik obsažených v ovladačích kanálu PWM:
- Maximální přípustný proud, tato charakteristika je uvedena pro normální provoz zařízení. Poměrně často výrobci uvádějí tento parametr v názvu modelu (například Phoenix-18). V některých případech je uvedena hodnota pro špičkový režim, kterou může regulátor udržovat několik sekund.
- Maximální jmenovité napětí pro nepřetržitý provoz.
- Odpor vnitřních obvodů regulátoru.
- Přípustný počet otáček, udávaný v ot./min. Nad tuto hodnotu regulátor nedovolí zvýšit otáčky (omezení je implementováno na softwarové úrovni). Vezměte prosím na vědomí, že rychlost je vždy uvedena pro 60000-pólové pohony. Pokud je pólových párů více, vydělte hodnotu jejich počtem. Například je uvedeno číslo 6 ot./min., proto pro 60000-magnetický motor bude rychlost otáčení 3/20000=XNUMX ot./min.
- Frekvence generovaných impulsů, u většiny regulátorů se tento parametr pohybuje od 7 do 8 kHz, dražší modely umožňují přeprogramovat parametr a zvýšit jej na 16 nebo 32 kHz.
Všimněte si, že první tři charakteristiky určují kapacitu databáze.
Bezkartáčové ovládání motoru
Jak bylo uvedeno výše, komutace vinutí pohonu je řízena elektronicky. Aby řidič určil, kdy přepnout, sleduje polohu kotvy pomocí Hallových senzorů. Pokud měnič není vybaven takovými detektory, pak se bere v úvahu zpětná EMF, která se vyskytuje v nezapojených statorových cívkách. Kontrolér, který je ve skutečnosti hardwarově-softwarovým komplexem, tyto změny sleduje a nastavuje pořadí přepínání.
Třífázový bezkomutátorový DC motor
Většina databází se provádí v třífázovém provedení. Pro řízení takového pohonu má regulátor stejnosměrný na třífázový pulzní měnič (viz obr. 7).

Obrázek 7. Diagramy napětí DB
Abychom vysvětlili, jak takový bezkomutátorový motor funguje, měli bychom zvážit obrázek 7 spolu s obrázkem 4, kde jsou postupně znázorněny všechny fáze provozu pohonu. Pojďme si je zapsat:
- Kladný impuls je aplikován na cívky „A“, zatímco záporný impuls je aplikován na „B“, v důsledku toho se kotva pohybuje. Senzory zaznamenají jeho pohyb a pošlou signál pro další sepnutí.
- Cívka “A” se vypne a kladný impuls přejde na “C” (“B” zůstane nezměněn), poté je dán signál další sadě impulsů.
- „C“ je kladné, „A“ záporné.
- Funguje dvojice „B“ a „A“, které dostávají pozitivní a negativní impulsy.
- Kladný puls je znovu aplikován na “B” a záporný puls na “C”.
- Cívky “A” jsou zapnuty (+ je dodáváno) a záporný impuls se opakuje na “C”. Poté se cyklus opakuje.
Ve zjevné jednoduchosti řízení je mnoho obtíží. Je nutné nejen sledovat polohu kotvy, aby se vytvořila další série impulsů, ale také řídit rychlost otáčení úpravou proudu v cívkách. Kromě toho byste měli zvolit nejoptimálnější parametry pro zrychlení a zpomalení. Za zmínku také stojí, že ovladač musí být vybaven blokem, který umožňuje ovládat jeho provoz. Vzhled takového multifunkčního zařízení je vidět na obrázku 8.

Rýže. 8. Multifunkční bezkomutátorový regulátor motoru
Výhody a nevýhody
Elektrický bezkomutátorový motor má mnoho výhod, jmenovitě:
- Životnost je mnohem delší než u běžných kolektorů.
- Vysoká účinnost.
- Rychlé nastavení na maximální rychlost otáčení.
- Je výkonnější než CD.
- Absence jisker během provozu umožňuje použití pohonu v podmínkách nebezpečí požáru.
- Není potřeba žádné další chlazení.
- Jednoduchá obsluha.
Nyní se podíváme na nevýhody. Významnou nevýhodou, která omezuje použití databází, je jejich relativně vysoká cena (s přihlédnutím k ceně ovladače). Mezi nepříjemnosti patří nemožnost použití databáze bez ovladače ani pro krátkodobou aktivaci, například pro kontrolu výkonu. Oprava problému, zejména pokud je nutné převinutí.

Bezkomutátorové stejnosměrné motory se také nazývají ventilové motory, v zahraniční literatuře BLDCM (BrushLes Direct Current Motor) nebo PMSM (Permanent Magnet Synchronous Motor).
Konstrukčně se bezkomutátorový motor skládá z rotoru s permanentními magnety a statoru s vinutím. Upozorňuji na skutečnost, že u komutátorového motoru jsou vinutí naopak na rotoru.
sběrač a bezkartáčový
Pojďme se nejprve naučit, jak funguje kartáčovaný motor.
Abyste věděli, proč jsou bezkomutátorové motory tak účinné a výkonné, musíte vědět, jak funguje standardní kartáčovaný motor.
Běžné kartáčované elektromotory mají pouze dva vodiče (kladný a záporný), které spojují motor s regulátorem otáček. Uvnitř krytu motoru můžete vidět dva zakřivené permanentní magnety a uprostřed je hřídel s kotvou, na které jsou navinuty měděné dráty. Na jedné straně hřídele kotvy je instalováno ozubené kolo motoru, na druhé straně hřídele je tzv. kolektor z měděných plátů, kterým je pomocí uhlíkových kartáčů přiváděn proud do vinutí kotvy.
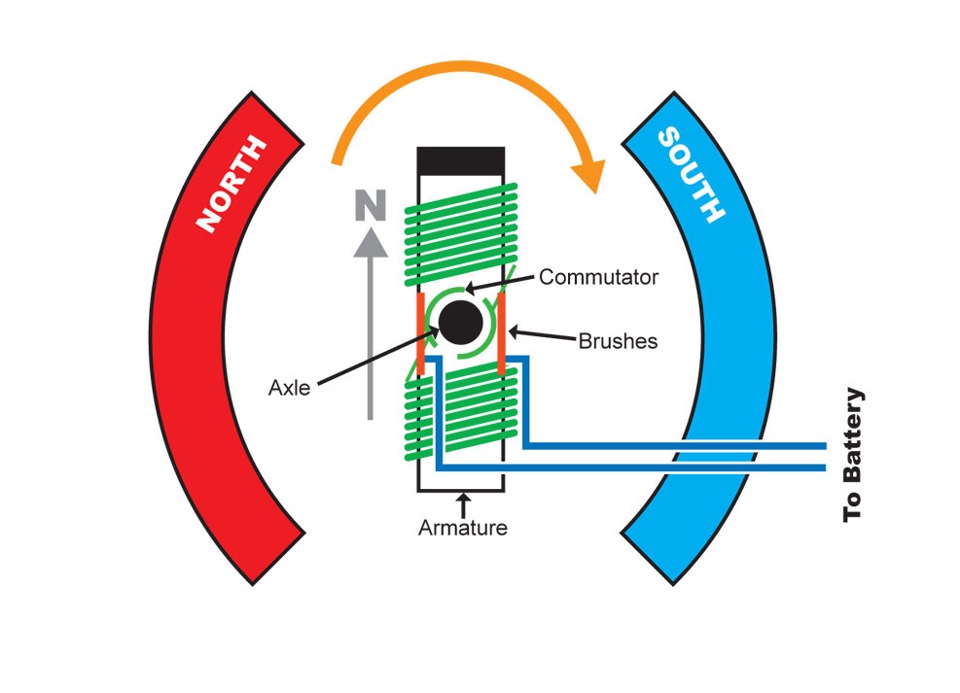
Dva uhlíkové kartáče neustále kloužou po rotujícím měděném komutátoru. Jak můžete vidět na obrázku výše, napětí je přiváděno přes dráty přes kartáče a komutátor do vinutí kotvy, čímž vzniká elektromagnetické pole, které interaguje s permanentními magnety statoru a způsobuje rotaci kotvy.
Jak se standardní komutátorový motor začne otáčet.
Při střídavém přivádění stejnosměrného elektrického proudu do vinutí kotvy v nich vzniká elektromagnetické pole, které má na jedné straně „severní“ pól a na druhé „jižní“ pól. Protože „severní“ pól jakéhokoli magnetu se automaticky odpuzuje od „severního“ pólu jiného magnetu, elektromagnetické pole jednoho z vinutí kotvy, interagující s póly permanentních magnetů statoru, způsobí rotaci kotvy. Přes komutátor a kartáče teče proud do dalšího vinutí kotvy, což způsobí, že se kotva spolu s hřídelí motoru dále otáčí a tak dále, dokud je do motoru přiváděno napětí. Kotva komutátorového motoru má obvykle tři vinutí (tři póly) – to zabraňuje zaseknutí motoru v jedné poloze.
Nevýhody kartáčovaných motorů se projeví, když z nich potřebujete získat obrovské množství otáček. Vzhledem k tomu, že kartáče musí být neustále v kontaktu s komutátorem, dochází v místě kontaktu ke tření, které se zejména při vysokých rychlostech výrazně zvyšuje. Jakákoli závada na komutátoru vede k výraznému opotřebení kartáčů a špatnému kontaktu, což následně snižuje účinnost motoru. To je důvod, proč seriózní závodníci brousí a leští rozvody motoru a mění kartáče téměř po každém závodě. Sestava komutátoru standardního motoru je také zdrojem rádiového rušení a vyžaduje zvláštní pozornost a údržbu.
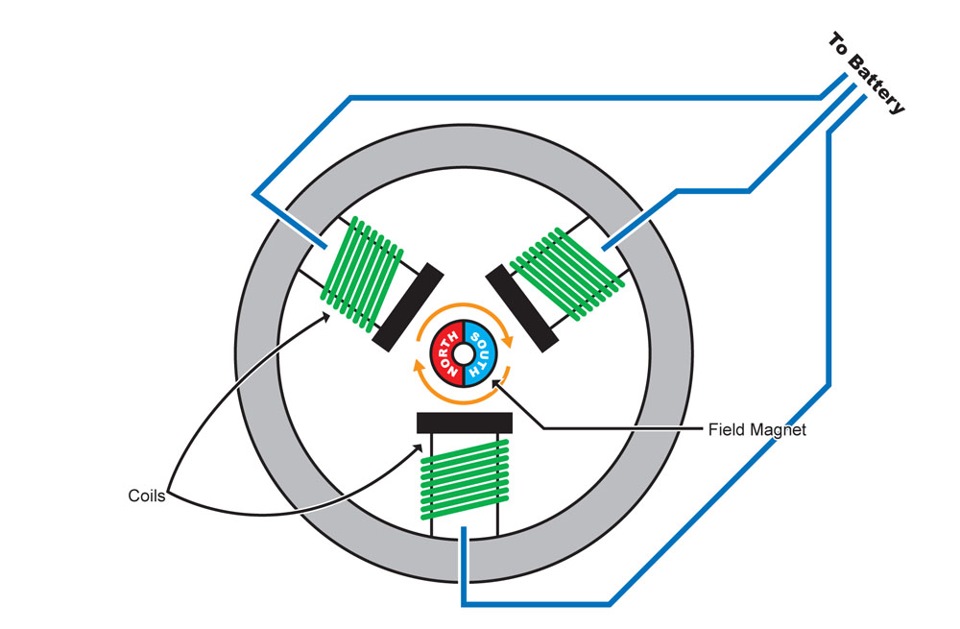
Nyní se podívejme, jak funguje bezkomutátorový motor.
Hlavním konstrukčním rysem bezkomutátorového motoru je, že jeho princip fungování je podobný kartáčovanému motoru, ale vše je uspořádáno „uvnitř ven“ a není zde žádný komutátor a kartáče. Permanentní magnety, které jsou u komutátorového motoru instalovány na stacionárním statoru, jsou u bezkomutátorového motoru umístěny kolem hřídele a tato jednotka se nazývá rotor. Drátová vinutí bezkomutátorového motoru jsou umístěna kolem rotoru a mají několik různých magnetických pólů. Bezsenzorové bezkomutátorové motory mají na rotoru snímač, který vysílá signály o poloze rotoru do procesoru elektronické regulace otáček.
Díky absenci komutátoru a kartáčů nemá bezkomutátorový motor kromě kuličkových ložisek rotoru žádné díly podléhající opotřebení, díky čemuž je automaticky účinnější a spolehlivější. Účinnost také výrazně zvyšuje přítomnost snímače řízení otáčení rotoru. U komutátorových motorů nedochází k jiskření kartáčů, což prudce snižuje výskyt rušení a nepřítomnost jednotek s vysokým třením má příznivý vliv na teplotu pracujícího motoru, což také zvyšuje jeho účinnost.
Jedinou možnou nevýhodou bezkomutátorového systému je mírně vyšší cena, ale každý, kdo zažil vysoký výkon bezkomutátorového systému a poznal krásu toho, že nemusí pravidelně vyměňovat kartáče, pružiny, komutátory a armatury, rychle ocení celkovou úsporu a nevrátí se k kartáčovaným motorům. nikdy!
Kromě základních velikostí a různých parametrů lze bezkomutátorové motory rozdělit podle typu: se senzorem a bez senzoru. Motor se snímačem využívá velmi malý snímač na rotoru a kromě tří silných kabelů, kterými motor přijímá energii, má další smyčku tenkých drátů, která spojuje motor s regulátorem otáček. Další vodiče přenášejí informace ze snímače o poloze rotoru stovkykrát za sekundu. Tyto informace jsou zpracovávány elektronickým regulátorem otáček, což motoru umožňuje co nejhladší a nejefektivnější chod. Tyto motory používají profesionální závodníci, ale tyto motory jsou mnohem dražší a obtížněji se používají.
Bezsenzorový bezkomutátorový systém, jak asi tušíte, nemá žádné senzory ani přídavné vodiče a rotor takových motorů se otáčí, aniž by přesně registroval svou polohu a rychlost regulátorem rychlosti. To usnadňuje výrobu motoru a regulátoru otáček, snadnější instalaci a obecně levnější. Bezsenzorové systémy mohou dodávat stejný výkon jako bezsenzorové systémy, jen s o něco menší přesností, díky čemuž jsou ideální pro amatéry a začínající sportovce.
















